Сегодня для проверки состояния нефтяных и газовых трубопроводов все чаще используют мобильных автономных роботов. Они могут своевременно определять различные повреждения, такие как износ материала, коррозию и утечки, тем самым снижая количество аварий и экологических катастроф. Важно, чтобы подобные устройства, помимо точной фиксации дефектов, были способны свободно ориентироваться во внутритрубном пространстве и передвигаться как по прямым, так и по наклонным частям трубы. Однако на данный момент роботы, представленные на рынке РФ, не соответствуют таким требованиям. Ученые Пермского Политеха разработали эффективный способ управления, позволяющий качественно диагностировать трубопровод криволинейной формы геометрии, к которым относятся отводы, повороты, изгибы с углом до 180°.
На изобретение получен патент (№2835290). Исследование проведено в рамках реализации программы стратегического академического лидерства «Приоритет 2030».
Со временем промышленные трубопроводы становятся все более подвержены разрушениям как снаружи, так и изнутри. Мониторинг их состояния необходим для своевременного предотвращения утечек и аварийных ситуаций при транспортировке нефти и газа.
Специальные роботизированные системы, передвигаясь внутри трубы, с помощью камер и чувствительных датчиков точно фиксируют все нарушения. А благодаря мобильности таких устройств проводить диагностику возможно и в труднодоступных местах. Однако для этого необходим эффективный способ управления таким роботом, который обеспечил бы его лучшую ориентацию во внутритрубном пространстве и проходимость при различных отводах и поворотах.
Существующие методы позволяют управлять движением только в основной линейной части внутри трубопровода или приводят к потере ориентации устройства в отводе при неизвестном радиусе кривизны, что ухудшает управляемость роботом.
Ранее ученые Пермского Политеха разработали инновационную конструкцию мобильного робота для проверки труб. Сейчас под руководством Ильи Келлера, профессора кафедры «Динамика и прочность машин» ПНИПУ, доктора физико-математических наук, запатентовали способ, который обеспечивает устойчивую пространственную ориентацию подобного устройства и тем самым его свободную управляемость при движении по криволинейному участку трубопровода с неизвестным радиусом кривизны.
Изобретение относится к управлению мобильными роботами, перемещающимися с помощью собственных движителей на борту. Оно может применяться в газо-, нефтепроводах, трубопроводах тепловых сетей, а также транспортирующих газообразные или жидкие среды.
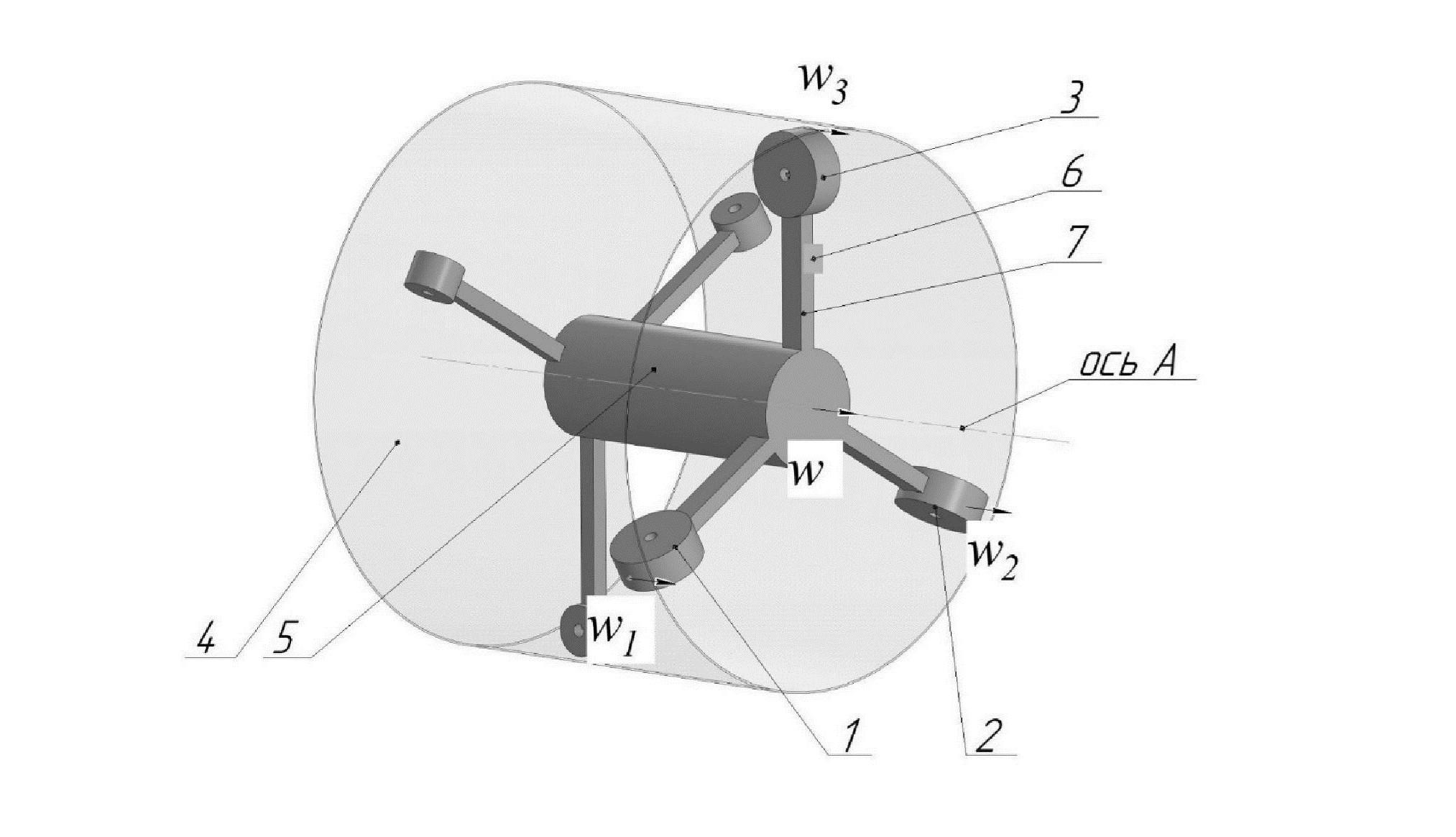
— Для реализации нашего способа используется робот с тремя приводными колесами на опорах, оснащенными движителями с самостоятельными приводами. Технический результат достигается за счет того, что в момент прохождения криволинейного участка двум колесам задают равную скорость вращения, например, 3 м/мин, тогда как третьему — большую. Далее с помощью предварительно размещенного гироскопа происходит постоянное измерение средней поступательной скорости движения устройства и угла его поворота. По этим данным вычисляется радиус кривизны трубопровода и оптимальная скорость вращения всех трех колес для ее лучшего преодоления, — объясняет Дмитрий Кучев, ассистент кафедры «Оборудование и автоматизация химических производств» ПНИПУ.
Политехники отмечают, что такое регулирование во время прохождения сложного участка позволяет роботу быстро занять устойчивую пространственную ориентацию и спокойно продвигаться по трубопроводу без проскальзывания по вязкой среде.
Разработка ученых Пермского Политеха обеспечит эффективное управление автономным роботом для диагностики внутритрубного пространства криволинейной формы. Способ повысит качество и скорость мониторинга промышленных трубопроводов.